
Trajectory Optimization for Unknown Constrained Systems using Reinforcement Learning
Published in IROS, 2019
This paper proposes a reinforcement learning-based algorithm for trajectory optimization for constrained dynamical systems. This problem is motivated by the fact that for most robotic systems, the dynamics may not always be known. This is the case especially for most industrial robots. Generating smooth, dynamically feasible trajectories could be difficult for such systems.
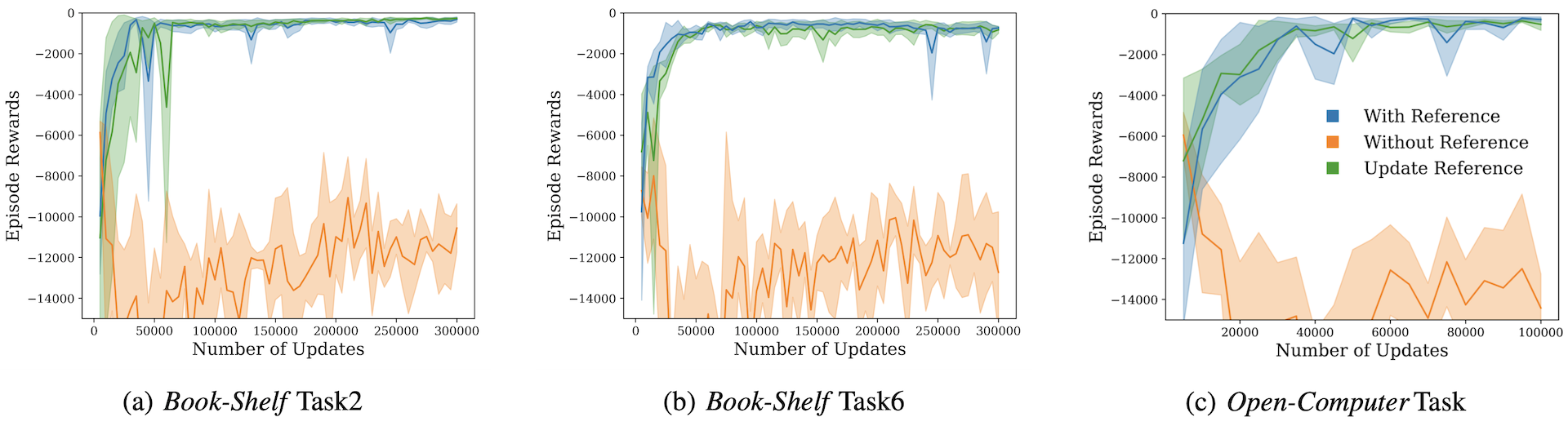
Using sampling-based algorithms for motion planning may result in trajectories that are prone to undesirable control jumps. However, they can usually provide a good reference trajectory which a model-free reinforcement learning algorithm can then exploit by limiting the search domain and quickly finding a dynamically smooth trajectory. We use this idea to train a reinforcement learning agent to learn a dynamically smooth trajectory in a curriculum learning setting.
Please see the details in our paper.