Page Not Found
Page not found. Your pixels are in another canvas.

A list of all the posts and pages found on the site. For you robots out there is an XML version available for digesting as well.
Page not found. Your pixels are in another canvas.
About me
This is a page not in th emain menu
Published:
How to install frankx to Ubuntu18
Published:
tf2rl: TensorFlow2 Reinforcement Learning
Published:
OpenCV-Python Tips
Published:
MuJoCo installに関するTips
Published:
zshではpip install -e .[hoge]が失敗するのでその対策をする
Published:
SafetyGymが公開されたので試してみた

Published:
C++17をMinGW+GCCを使ってビルドする
ARLISS2013(優勝)、ARLISS2014、ARLISS2015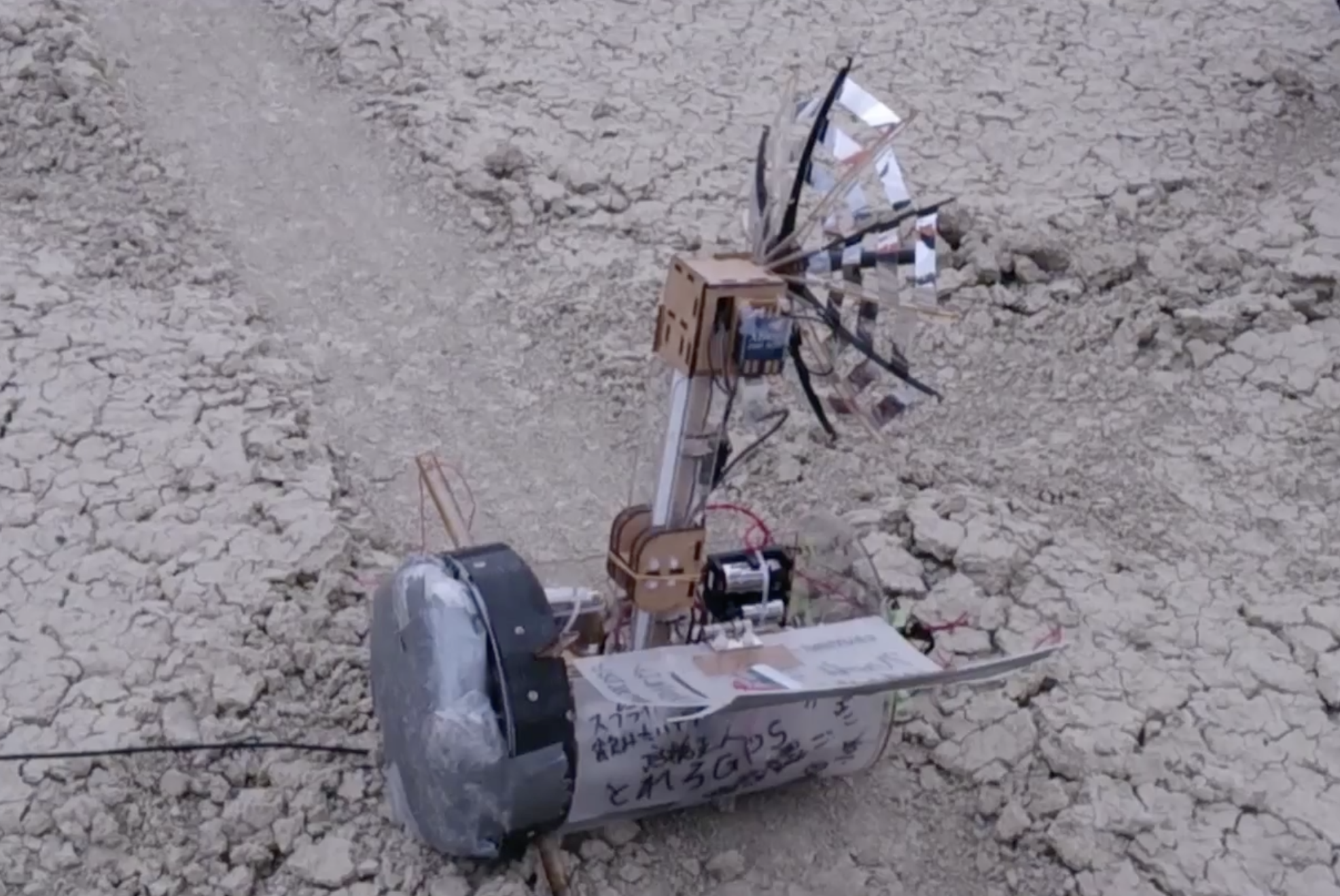
第17回ロボットグランプリ 優勝
4軸ロボットアームの設計・製作・制御を担当

2014年アイデア大賞:五輪紋章創造衛星武蔵
2015年設計大賞:重力波天体観測衛星ひばり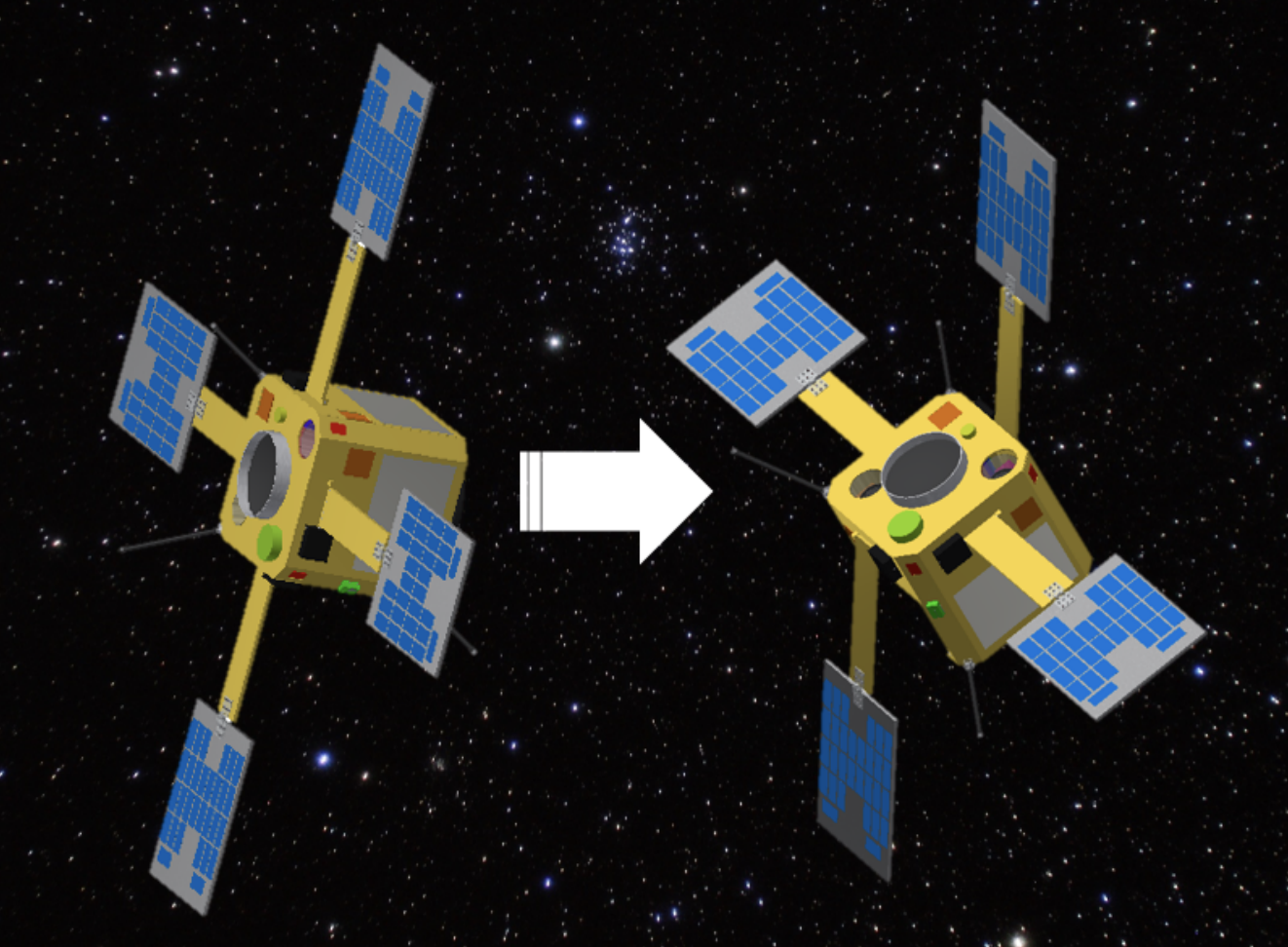
C&DH系組込SW開発,衛星自動運用システム,プロジェクトマネージャを担当
フルレンジスピーカの製作
オンボード衛星画像分類ソフトウェア開発,プロジェクトマネージャを担当
Published in IROS, 2019
This paper proposes a RL-based algorithm for trajectory optimization for constrained dynamical systems.
Download here
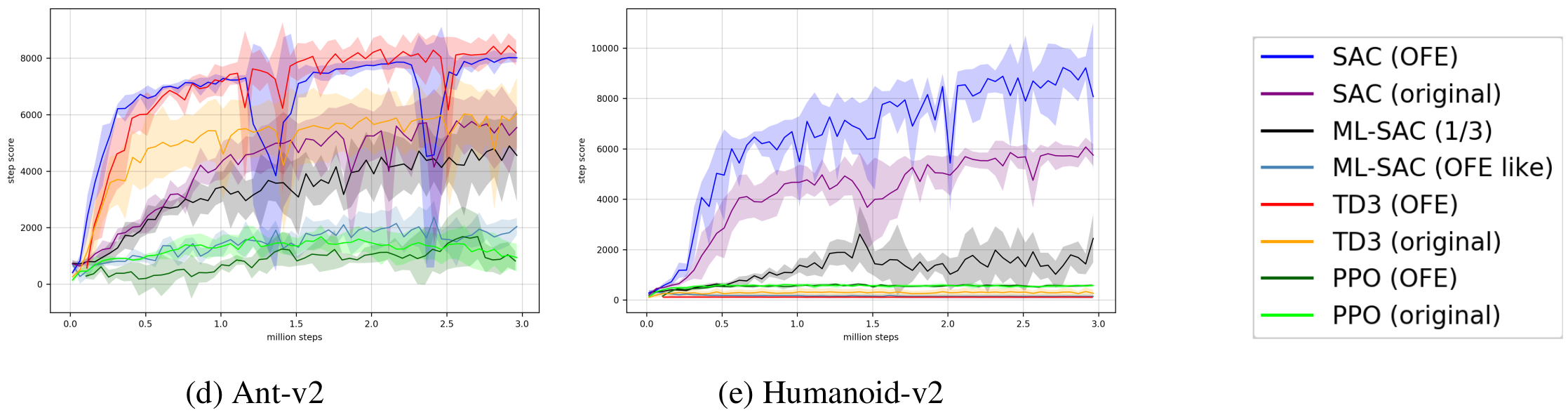
Published in ICML, 2020
This paper intentionally increases input dimensionality to improve the performance of Deep RL algorithms. The proposed OFENet significantly improves sample efficiency and final performance of RL algorithms.
Download here
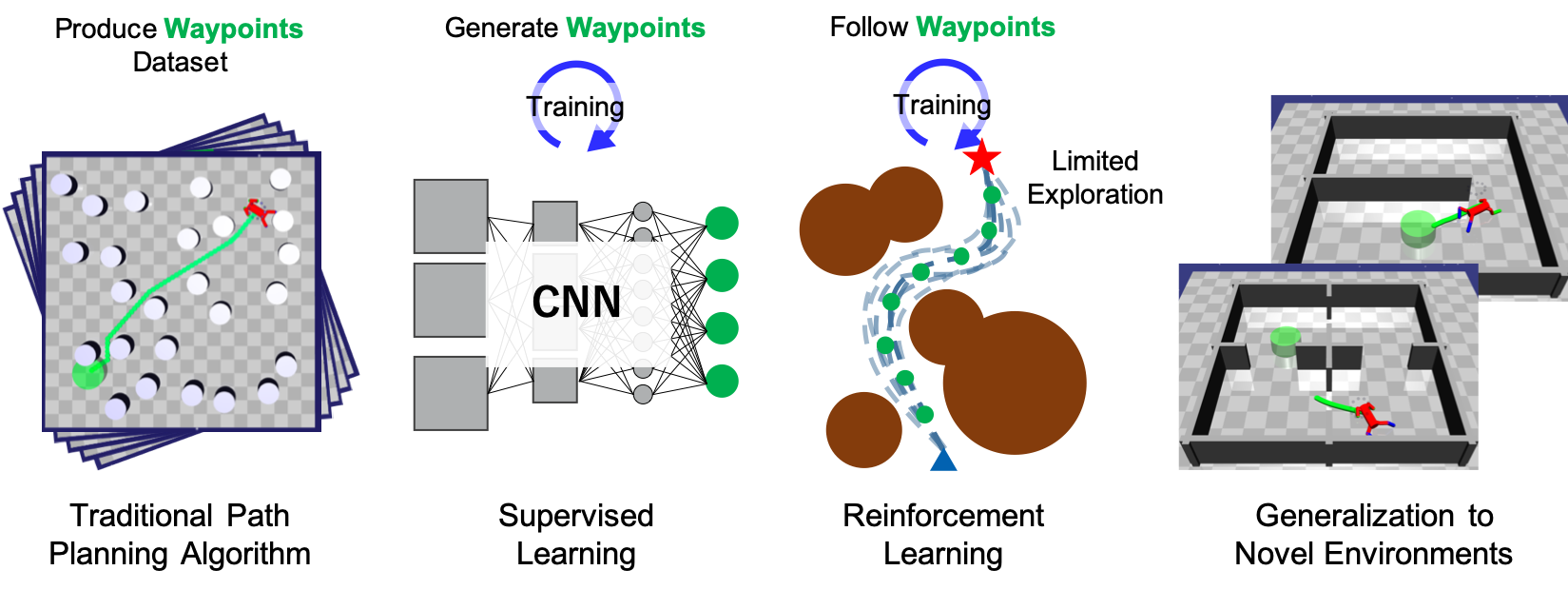
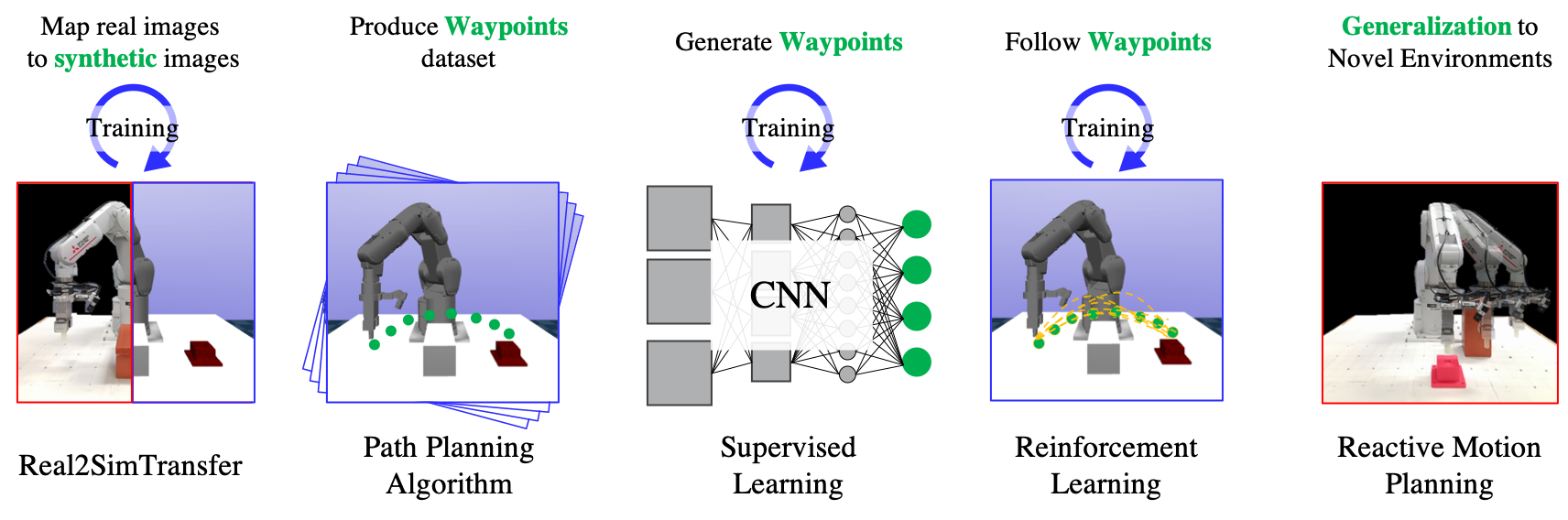
Published in IROS, 2020
This paper proposes to decouple planning and control by combining traditional path planning algorithms, supervised learning (SL) and reinforcement learning (RL) algorithms in a synergistic way. By exploiting waypoints produced from SL, an RL agent easily learns to navigate to arbitrary goal locations, and generalize to novel environments.
Download here
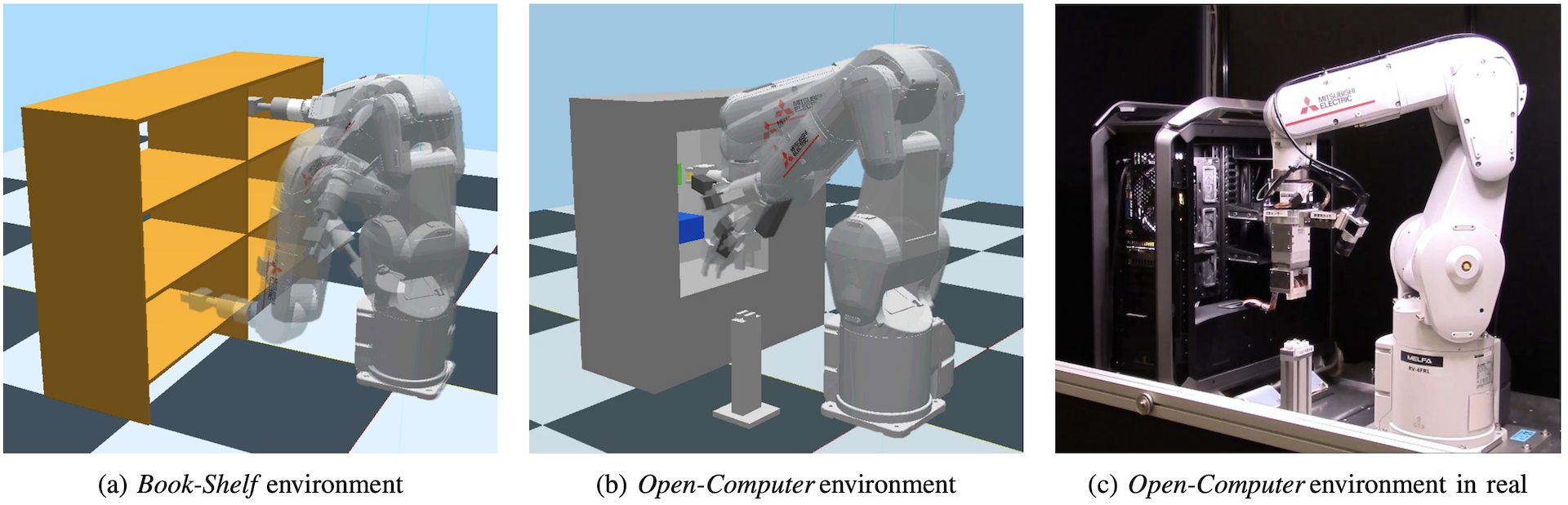
Published in CoRL, 2020
This paper proposes a reactive planning in dynamic environments.
Download here
Undergraduate course, University 1, Department, 2014
This is a description of a teaching experience. You can use markdown like any other post.
Workshop, University 1, Department, 2015
This is a description of a teaching experience. You can use markdown like any other post.